Строение робота
Каждый робот состоит из следующих базовых компонентов:
- Рама или тело робота;
- Блок управления;
- Манипуляторы;
- Ходовая часть.
(Наглядное устройство робота)
Робот может быть любых форм и размеров. Именно рама или тело робота является основой его конструкции и определяет внешний облик. Среднестатистический человек при слове «робот» представляет человекоподобное существо из металла. Этот образ навязан многочисленными фантастическими кинофильмами.
На самом же деле большинство роботов совершенно не похоже на человека. Главное для робота – это его функциональность, а не то, как он выглядит.
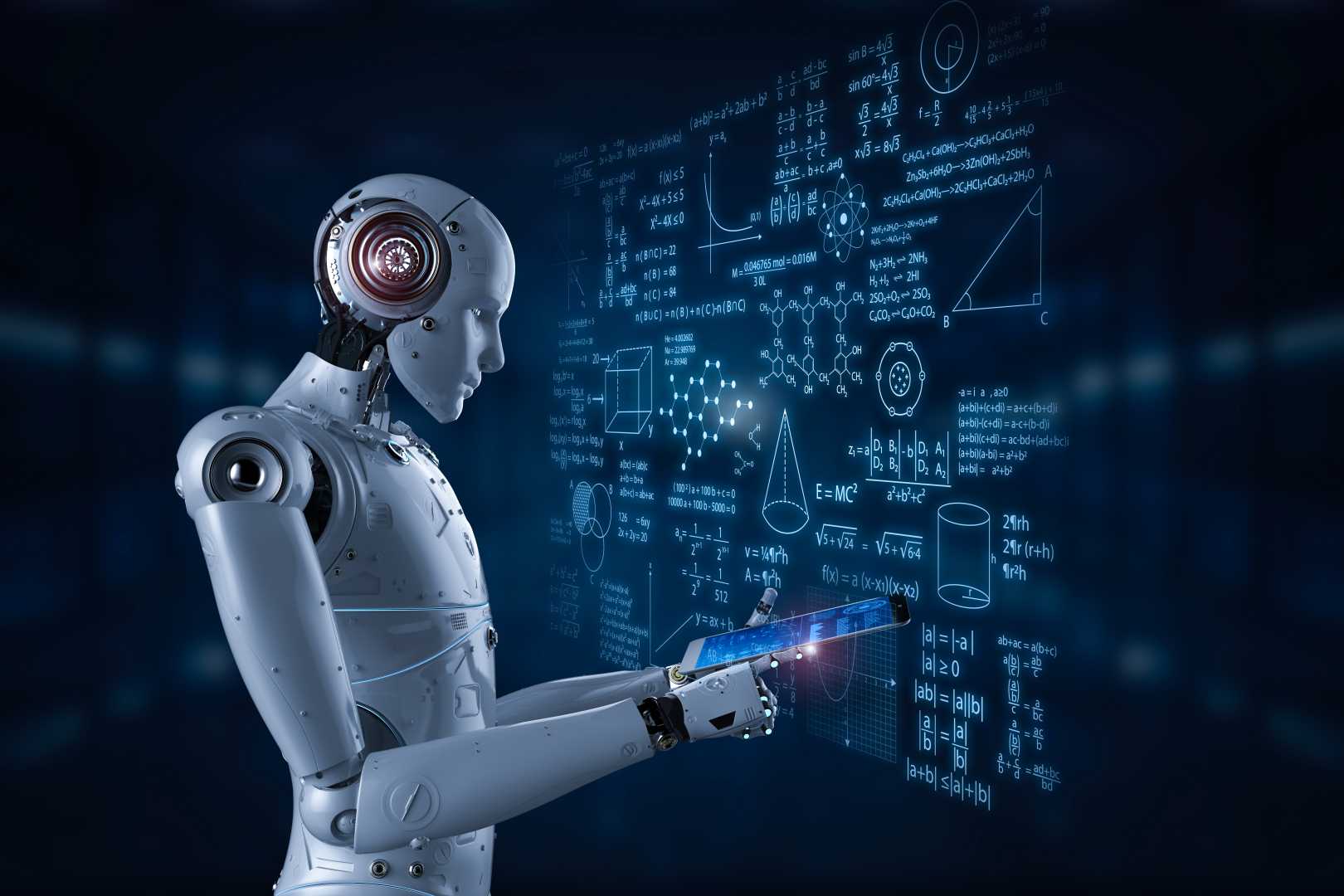
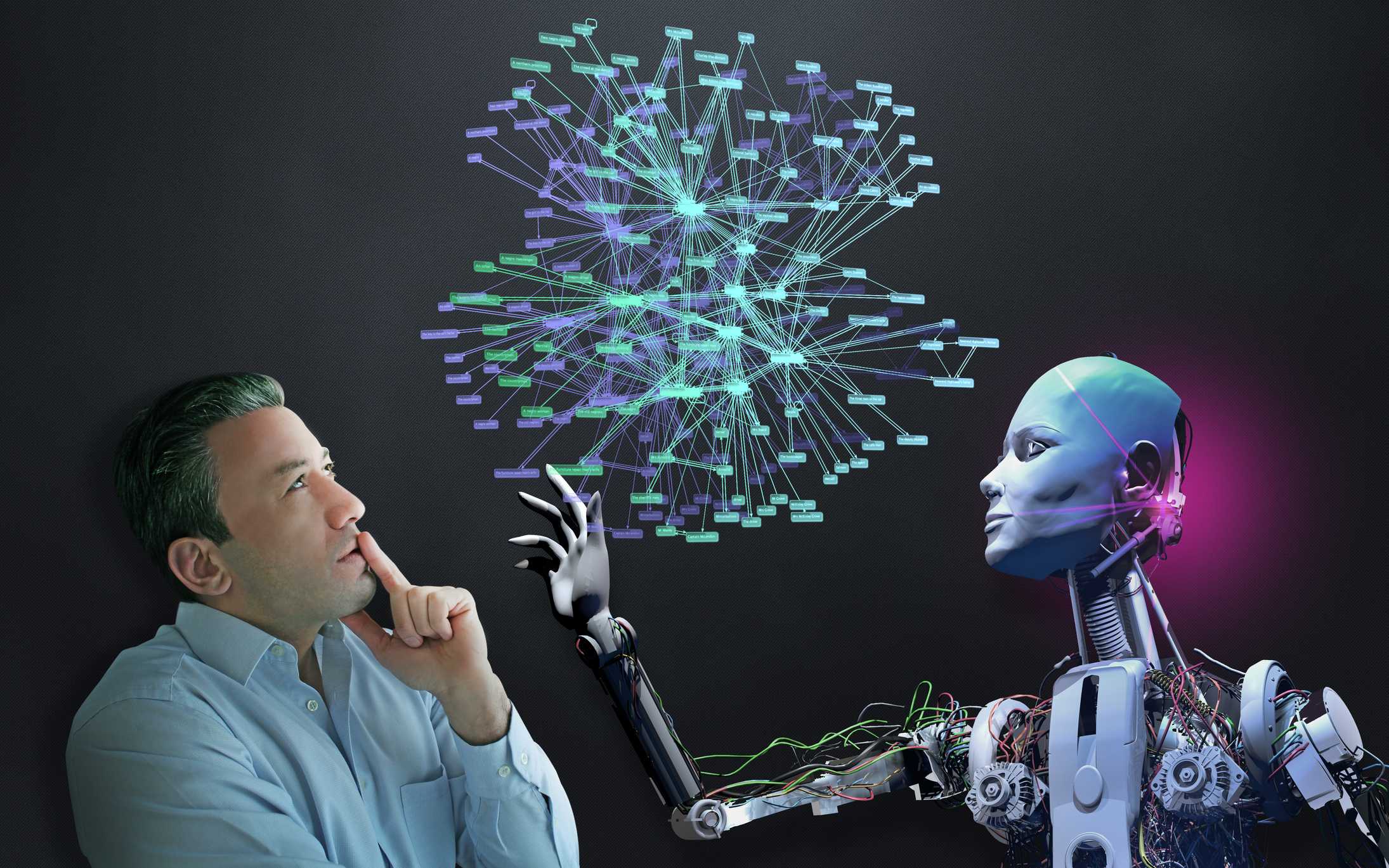
Контроль за работой робота осуществляется при помощи системы управления. Она включает в себя огромное количество датчиков, которые помогают технике взаимодействовать с внешним миром.
(На картинке робот Humanoid)
Система управления роботом предполагает целый набор алгоритмов, благодаря которым решаются те или иные задачи. В работе робота происходит постоянный обмен данными между датчиками и центральным процессором (ЦП). Алгоритмы и программное обеспечение создаются человеком.
Для физического контакта с объектами внешней среды используется манипулятор. Данный элемент не является обязательным. Как правило, манипулятор не является частью рамы/тела робота. Используется для решения конкретных задач в различных отраслях.
Ходовая часть робота также не является обязательной, и наличествует лишь у тех роботов, которым необходимо передвижение в пространстве. В качестве средств для перемещения чаще всего используются колеса.
Роботы в ближайшем будущем
Всё больше производственных операций будет роботизироваться. Использование программируемого производства (custom manufacturing) потребует универсальных мобильных роботов, способных не только выполнять заранее заданный набор операций на рабочем месте, но и свободно передвигаться по производственным помещениям, переносить между рабочими местами компоненты и готовые изделия и гибко реагировать на изменения в производственном процессе. Скоро такие физически простые дела как работа аптекаря или библиотекаря в книгохранилище будут отданы роботам.
 Робот-аптекарь Робби
Робот-аптекарь Робби
Большое количество почти полностью роботизированных фабрик и заводов начнёт появляться к 2020. К 2010-2015 роботы начнут активно использовать в сельском хозяйстве. Специализированные роботы, помогающие человеку в тяжёлой физической работе (но не полностью автономные) появятся к 2015 году. Роботов на улицах наших городов мы увидим уже к 2010-2015 году. Это будут роботы-уборщики, роботы-погрузчики.
Большая часть транспорта будет автоматизированной к 2020-2030 году. Сегодняшние автомобили значительно поумнеют: сперва они будут лишь помогать водителям выполнять некоторые операции (сложная парковка, контроль за безопасностью, движение по шоссе), но потом они возьмут на себя весь процесс вождения. Чуть раньше мобильные роботы появятся в транспортной отрасли (например, погрузочные) и горнодобывающей. Мы увидим полностью автоматизированные логистические терминалы.
 Хирургический робот Da Vinci
Хирургический робот Da Vinci
Роботы будут всё больше использоваться в медицине. В некоторых областях они уже могут работать более эффективно, с большей точностью и меньшей вероятностью ошибки, чем доктора люди. Скоро можно будет совместить робохирургов с технологиями диагностирования (экспертные системы уже давно используются для постановки диагнозов, анализа рентгеновских снимков и т. п.). В этой области робототехника соприкасается с телехирургией, удалёнными операциями, выполняемыми человеком по видеосвязи. К 2020 году значительная часть операций будет выполняться роботами, а первые микророботы начнут вести наблюдения над здоровьем людей внутри их тел.
Роботизация будет не совсем такой, какой её описывали фантасты. Она будет сочетаться с автоматизацией (без автономности), переносом множества видов деятельности в онлайн (как заказ билетов), поумнением нашего окружения (дома, дороги, и т. п.). Например, не будет андроида-лифтёра, нажимающего кнопки, будет умный лифт. Не будет роботов-переводчиков, как 3PO из «Звёздных войн», будут функции синхронного перевода в телефонах, карманных и носимых компьютерах.
 Робот, играющий в карты с людьми (будущее)
Робот, играющий в карты с людьми (будущее)
Тем не менее, появится огромное количество автономных специализированных роботов, но выглядящих совершенно по разному и выполняющих очень разные функции. Роботы будут передвигаться на колёсах, на двух и более ногах, ползком, прыжками и другими способами, причём не только по земле, но и по поверхности других планет. Роботы будут плавать на поверхности рек и морей и в глубинах океана, летать в воздухе (некоторые без посадки), обеспечивая связь и наблюдение за окружающей средой. Многие роботы будут способны менять свою форму и структуру в зависимости от ситуации. Программы и форма роботов смогут создаваться с помощью эволюционных алгоритмов.
Будут и похожие на человека двуногие и двурукие андроиды, универсальные помощники, созданные для взаимодействия с человеком в обычной среде, помощи ему в повседневной деятельности и любви. Первые подобные андроиды – это японский Asimo и корейский Hubo. Распространение на работе и в быту первые такие роботы получат после 2010 года.
Профессия робототехника: плюсы и минусы
Как и в любой профессии, специалистов в области робототехники ждут не только насыщенные открытиями будни, но и сложности, с которыми придётся справляться. Так какие же плюсы и минусы таит в себе профессия конструктора роботов и близкие ей?
Плюсы робототехники
- высокая востребованность специалистов;
- возможность много зарабатывать;
- интересные нестандартные задачи;
- широкий выбор мест работы;
- стабильное развитие в будущем.
Минусы робототехники
- трудности трудоустройства в России;
- малое количество специализированных вузов;
- слабый уровень образования;
- высокий конкурс при поступлении.
Всё это не повод не становиться профессионалом в сфере робототехники. В этой области, как и во многих других, придётся учиться всю жизнь и постоянно узнавать что-то новое.
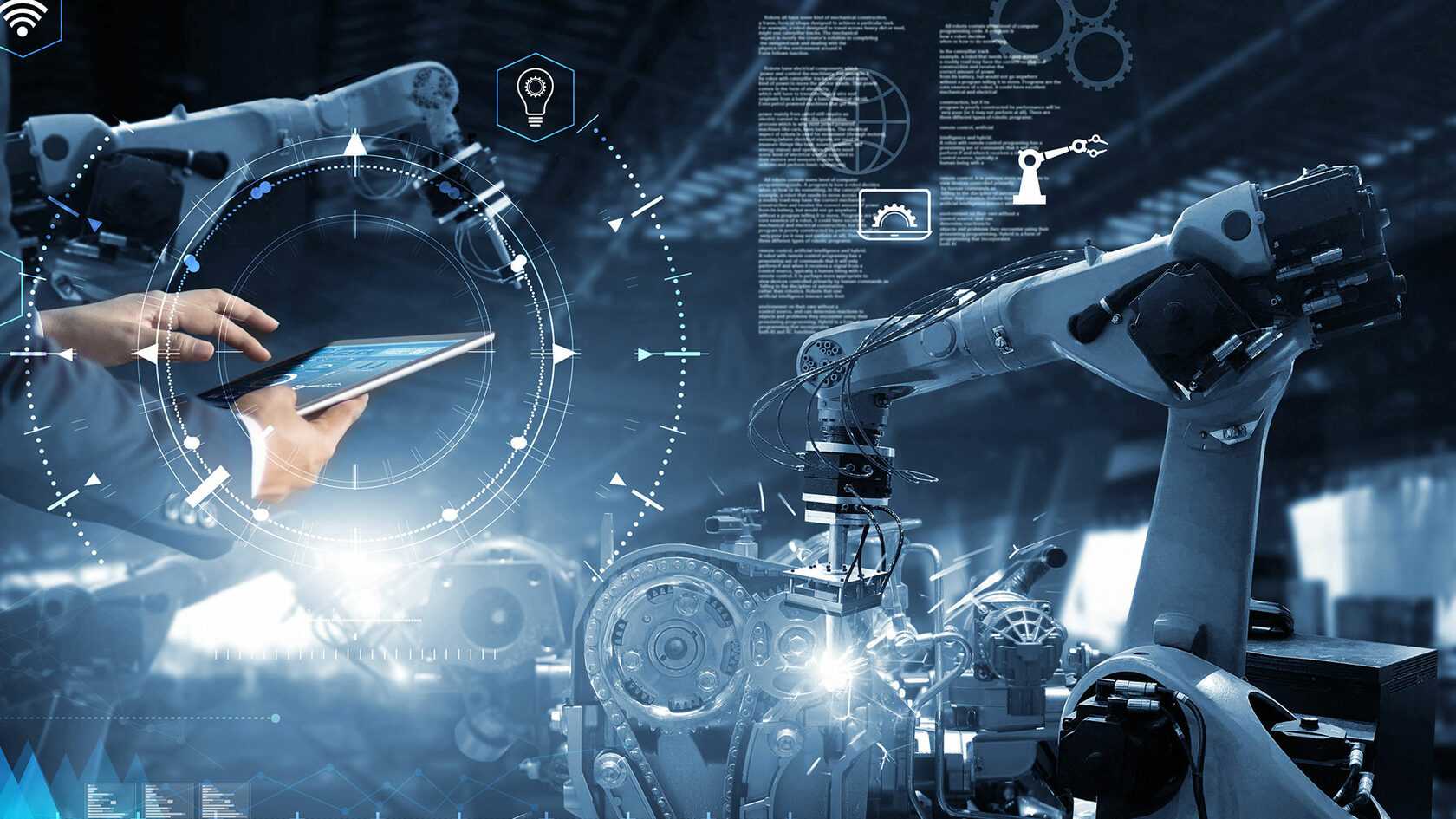
Робот-манипулятор: производство и назначение
Роботы-манипуляторы представляют собой сложные устройства, действующие по заранее заложенной в их систему управления программе.
Они получили очень широкое распространение на производственных предприятиях, помогая облегчить погрузочно-разгрузочные операции, сборку и обработку изделий и многие другие технологические процессы. Сфер применения современных промышленных роботов огромное количество.

Технология производства промышленных роботов постоянно совершенствуется. Если раньше манипуляторы представляли собой статичные устройства, способные двигаться в одной или нескольких плоскостях, то сегодня роботы могут перемещаться по территории производственного комплекса для выполнения своих задач, благодаря компьютерному зрению они работают точно и быстро, а с развитием искусственного интеллекта они оперативно подстраиваются под изменяющиеся условия, обучаются у человека новым навыкам и принимают решения на основе собственного опыта.
Несомненно, такие сложные системы для выполнения большого количества функций имеют множество соединений и узлов трения.
Обеспечить стабильную и длительную работу такого оборудования позволяют инновационные смазочные материалы, такие как антифрикционные твердосмазочные покрытия.
Например, на шестерни рулевых механизмов роботов-манипуляторов на этапе их производства наносится покрытие MODENGY 1014.

Оно формирует тонкий разделительный слой, снижающий трение и повышающий плавность перемещения деталей.
Разработчики роботов выбирают такие смазочные материалы за их длительный срок службы, что позволяет исключить необходимость обслуживания узлов роботов и требуемую для этого остановку их работы.
Aibo от Sony
После почти 20-летнего перерыва роботизированная собачка Aibo возвращается, и на этот раз с весьма интересными обновлениями. Помимо улучшения внешнего вида, новый робот-питомец использует преимущества искусственного интеллекта, лучше понимает окружающую среду и команды, а также развивает уникальный характер на основе взаимодействия с его владельцем.
Знакомьтесь! Aibo. Милота, да и только.






Новое понимание контекста – вот что характеризует эволюцию социальных роботов, которые, как многие надеются, смогут помочь в обучении детей или обеспечить поддержку для пожилых людей.
За новыми роботами приглашаем вас в наш канал с новостями.
Роботы сегодня
Сегодня в мире используются миллионы роботов. Применение им нашлось практически во всех сферах человеческой деятельности. Роботы управляют самолётами и поездами, спускаются в жерла вулканов и на дно океана, помогают в строительстве космической станции, в сборке автомобилей и производстве микрочипов, охраняют здания, используются военными для разведки и разминирования, помогают спасателям искать людей под завалами. Нет такой области, в которой человек не попытался создать себе автоматического помощника.
 Украинский робот на ликвидации последствий чернобыльской аварии
Украинский робот на ликвидации последствий чернобыльской аварии
На производстве работают сотни тысяч роботов, но гораздо больше их трудится за пределами фабричных цехов. Автономные роботы, обладающие свободой передвижения, включают в себя автономные летательные аппараты, существуют роботы-сапёры (Mini-Andros), роботы-газонокосилки (Robomower), роботы-курьеры (HelpMate), доставляющие лекарства и документы в некоторых больницах, и т. д.
 Научить роботов играть в футбол – непростая задача
Научить роботов играть в футбол – непростая задача
Особая категория – андроиды или человекообразные роботы. Создать андроидов оказалось более сложным делом, чем ожидалось. Потребовались значительные достижения в области эффективных моторов, технологий машинного зрения и увеличение вычислительной мощности компьютеров, чтобы появились первые андроиды, способные передвигаться, ориентироваться в пространстве и что-то делать, такие как ASIMO и Qrio. Технологии машинного зрения позволяют роботам (пока ещё не очень хорошо) ориентироваться в пространстве, находить дорогу, распознавать предметы. Роботы могут узнавать людей по лицам и голосам. Технологии искусственного интеллекта позволяют роботам самостоятельно принимать решения и действовать автономно.
Нет чёткой грани между роботами и просто машинами. К роботам можно отнести и автоматические поезда и беспилотные летательные аппараты. Существующие технологии (автопилоты) даже позволяют компьютерам осуществлять полёты пассажирских самолётов от взлёта и до посадки. Можно считать функционально близкими к роботам банкоматы и более совершенные киоски для выполнения различных финансовых операций – они эффективно заменяют работника-человека.
 iRobot продала более 2 миллионов роботов-пылесосов Roomba
iRobot продала более 2 миллионов роботов-пылесосов Roomba
Развлекательные роботы появились с выходом на рынок Aibo, робособаки от Sony. Теперь многие игрушки наделяются зачатками интеллекта – процесс, который скоро приведёт к появлению действительно разумных игрушек вроде медвежонка из фильма AI. Роботы-тюлени и роботы-кошки повышают настроение пожилых людей в японских домах престарелых. Начинается использование роботов для обучения и развлечения детей в детских садах и школах США и Южной Кореи.
В начале 2000-х роботы проникли в сферу домашнего хозяйства (что было предсказано футуристами в 60-е годы): газонокосилки, роботы пылесосы и мойщики пола. iRobot продала уже несколько миллионов робопылесов Roomba. Поумнели и неподвижные машины: стиральные, посудомоечные и т. п. Домашние роботы быстро входят в нашу жизнь. Скоро (примерно к 2015-2020 году) в среднем «умном» доме будет несколько интеллектуальных предметов бытовой техники и несколько автономных роботов.
Cookie файлы бывают различных типов:
Необходимые. Эти файлы нужны для обеспечения правильной работы сайта, использования его функций. Отключение использования таких файлов приведет к падению производительности сайта, невозможности использовать его компоненты и сервисы.
Файлы cookie, относящиеся к производительности, эффективности и аналитике. Данные файлы позволяют анализировать взаимодействие посетителей с сайтом, оптимизировать содержание сайта, измерять эффективность рекламных кампаний, предоставляя информацию о количестве посетителей сайта, времени его использования, возникающих ошибках.
Рекламные файлы cookie определяют, какие сайты Вы посещали и как часто, какие ссылки Вы выбирали, что позволяет показывать Вам рекламные объявления, которые заинтересуют именно Вас.
Электронная почта. Мы также можем использовать технологии, позволяющие отслеживать, открывали ли вы, прочитали или переадресовывали определенные сообщения, отправленные нами на вашу электронную почту. Это необходимо, чтобы сделать наши средства коммуникации более полезными для пользователя. Если вы не желаете, чтобы мы получали сведения об этом, вам нужно аннулировать подписку посредством ссылки «Отписаться» («Unsubscribe»), находящейся внизу соответствующей электронной рассылки.
Сторонние веб-сервисы. Иногда на данном сайте мы используем сторонние веб-сервисы. Например, для отображения тех или иных элементов (изображения, видео, презентации и т. п.), организации опросов и т. п. Как и в случае с кнопками доступа к социальным сетям, мы не можем препятствовать сбору этими сайтами или внешними доменами информации о том, как вы используете содержание сайта.
Искусственный мышцы: самозалечивающиеся, гидравлически усиленные приводы
В попытке найти способ обеспечить силой мягкую робототехнику, в прошлом году ученые из Колорадского университета разработали серию крайне недорогих искусственных мышц, способных поднимать в 200 раз больше собственного веса и даже самоизлечиваться.
Эти устройства основаны на мешочках, заполненных жидкостью, которая заставляет их сокращаться с силой и скоростью скелетных мышц при подаче напряжения. Наиболее перспективным для применения в робототехнике является так называемый Peano-HASEL, который представляет несколько прямоугольных пакетов, соединенных последовательно, которые сжимаются линейно, как настоящие мышцы.
Первый промышленный робот
Первый промышленный робот был внедрен на производственной линии завода General Motors в 1961 году. «Юнимейт» представлял собой мощную роботизированную руку для установки литых металлических изделий и сварных компонентов на шасси автомобиля. Это был первый робот-манипулятор, который помог ускорить производственные линии на заводах по всему миру.

Первоначальная стоимость манипулятора «Юнимейт» составила 25 000 долларов. У робота было шесть программируемых осей движения, а конструкция позволяла работать с тяжелыми объектами на высокой скорости. Манипулятор весом 1,8 тонны оказался чрезвычайно универсальным и вскоре стал одним из самых популярных промышленных роботов в мире.
«Юнимейт» стал популярным и вне промышленного производства, приняв участие в «Вечернем шоу Джонни Карсона», в котором он разливал пиво и даже дирижировал оркестром.
Джордж Девол, первым разработавший промышленного программируемого робота в 1954 году, основал первую в мире компанию по производству роботов, Unimation. Роботы стали обычным явлением на современных сборочных линиях, так как их способность выполнять повторяющиеся задачи на высокой скорости превращает их в идеальные средства производства.
Робот — уже не робот
Робототехника находится на стыке фундаментальной математики и «железа».
С одной стороны, вы придумываете робота, продумываете его инженерный дизайн, изготавливаете или печатаете на 3D-принтере необходимые детали: схваты, элементы, звенья, простейшие двигатели.
С другой, прикладываете к нему математическое обеспечение.
Стоит отметить, что робот не обязательно должен быть похож на человека, собаку или другое живое существо.
Такое представление было распространено в 80-90-е, когда большой популярностью пользовались фильмы вроде «Терминатор» или «Приключения Электроника».
Чаще всего эти задачи сводят к формуле 4D: dull (скучно), dirty (грязно), dangerous (опасно) и dear (дорого).
Например, роботы могут контролировать состояние шахт, заказывать и привозить еду, напоминать о предстоящих делах или делать за вас уборку в доме.
Они могут быть воплощены в виде алгоритма, программы, специально разработанного устройства или даже химических молекул, так называемых нанороботов, которые используются для таргетной доставки лекарств.
Даже приложение в телефоне, например, Siri, это тоже робот
Самое важное в робототехнике — польза. Роботы должны делать жизнь человека более комфортной.
Направления разработок в современной робототехнике

Робототехника развивает разные направления в функционировании роботов.
Управление. Сегодня роботы управляются с помощью программ, есть следующие варианты управления:
-
Машины с жесткой программой. В них заложена одна программа с одним вариантом работы, которая не способная меняться. Робот действует всегда и в любых условиях по одному и тому же алгоритму.






-
Адаптивные роботы. В них внедрена сенсорная система, которая считывает внешние условия, а программа в зависимости от них может выбирать один из вариантов работы.
-
Роботы с гибкими программами. Это самые современные модели, которые ориентируются на цель работы, могут не только получать, но и анализировать информацию о внешних факторах. В зависимости от них роботы гибко меняют поведение и выбирают оптимальный вариант поведения и действий.
-
Коллаборативные роботы. Это машины, которые работают в «сотрудничестве» с человеком, то есть их действия не полностью независимы, а контролируются или управляются оператором.










Позиционирование. Роботы программируются с различными системами координат и разным позиционированием в пространстве.
-
С прямоугольной системой координат. Они могут перемещаться по двум либо трем осям — в плоскости или в пространстве.
-
С цилиндрической системой координат. Такие роботы вращаются в одной степени и перемещаются минимум в одном направлении.
-
С полярной системой координат. Подобные агрегаты имеют две степени вращательного движения.
-
Шарнирные роботы уже имеют три и более вращательных степеней.
-
Scara — имеют две вращательные степени, которые передвигаются по параллельным осям.
-
Комбинированные роботы — совмещают разные типы позиционирования и перемещения.
Способ перемещения. Если роботу необходимо передвигаться, он оснащается различными системами перемещения. Их выбор зависит от назначения робота и от того, где он будет применяться. Способы перемещения могут быть изолированы, а могут сочетаться и комбинироваться.
-
Колеса. Робот может иметь разное число колес от одного и более. Колеса также влияют на маневренность.
-
Гусеницы. Роботы на гусеничном ходу имеют высокую проходимость, поэтому они востребованы в сложных природных условиях, в боевых установках и т. п.
-
Имитация человеческих шагов. Такой способ перемещения применяют в основном в человекоподобных роботах-андроидах.
-
Полет. Используются разные механизмы и способы, чтобы поднять робота в воздух. Обычно такие технологии используются в БПЛА разного назначения — от игрушечных до боевых дронов.
-
Плавание. Как и с летающими роботами, есть разные способы «заставить» робота плыть.
-
Имитация движений животных. Робот может имитировать передвижение любых животных, от насекомых до млекопитающих.
Первый роботизированный транспорт
После Всемирной выставки 1964 года писатель-фантаст Айзек Азимов в своих записях предсказал, что спустя 50 лет автомобили будут управляться «робомозгами». В течение многих лет после этого беспилотные транспортные средства существовали лишь в виде теоретических концепций и исследовательских проектов.
Компания Mercedes-Benz с 1980-х годов занимается исследованиями в области беспилотных транспортных средств
Настоящий прогресс начался в 1986 году, когда в Мюнхенском университете был запущен проект PROMETHEUS под управлением Европейского агентства координации исследований (EUREKA, European Research Coordination Agency). В течение почти десятилетия команда разработчиков трудилась над проектом беспилотного автомобиля под названием VITA, оборудованного датчиками, позволяющими регулировать скорость машины при обнаружении опасности.
В 1994 году автомобиль VITA совершил 1000-километровую поездку по парижскому шоссе в условиях плотного трафика, достигнув скорости в 128 километров в час. Позднее некоторые аспекты VITA были учтены при конструировании будущих автомобилей Mercedes-Benz.
Виды роботов в робототехнике
Роботы применяются в различных сферах, где они эффективнее человека. Самые распространенные назначения роботов:
-
Промышленные. До появления микропроцессоров роботы на производстве встречались нечасто, так как их стоимость была высока, что делало применение нерентабельным. Но микропроцессорные системы, появившиеся в 1970-х годах, позволили снизить стоимость роботов в 3 раза. После этого их массовое внедрение в производство стало неизбежным. Использовать роботов выгодно по многим причинам: они могут работать круглосуточно, без перерывов и отдыха, не требуют повышения зарплаты, не устраивают забастовки. Они работают быстрее и точнее, чем человек, при этом не боятся высоких температур, ядовитых испарений и выбросов.
-
Медицинские. По большей части роботы используются в хирургии. Впервые автоматизированное устройство было применено еще в 1985 году в процедуре биопсии мозга под управлением компьютера. Сегодня самый массовый робот в медицине — Да Винчи, который проводит лапароскопические операции. Он «работает» в сотнях клиник по всему миру.
-
Бытовые. В наши дни бытовые роботы шире всего представлены в виде роботов-пылесосов. Они могут собирать пыль и небольшой мусор в жилье, двигаясь по сложному алгоритму, и самостоятельно возвращаются на станцию для подзарядки. А первым бытовым роботом, созданным для развлечения, стала автоматизированная собачка от Sony. Бытовые роботы могут выполнять и более сложные работы, например, андроид Вакамару узнает людей, выполняет простые функции секретаря, знает несколько фраз. Но стоимость подобных машин пока что не позволяет массово внедрить их в нашу жизнь.
-
Боевые. Такие роботы были разработаны, чтобы убрать присутствие человека из мест и ситуаций, которые угрожают жизни. Боевые роботы занимаются разведкой на земле, в воде и в воздухе, разминированием, наносят боевые удары. Большинство боевых роботов являются коллаборативными, то есть управляются оператором, и лишь немногие способны действовать автономно.
-
Исследовательские. Эти роботы незаменимы в сложных и экстремальных условиях. Они способны работать в любой среде, в том числе при высоких температурах, радиации, на большой глубине, в разреженном воздухе и т. д.
-
Развлекательные. Многие роботы на радиоуправлении и интерактивные являются, по сути, игрушками. Они могут петь, декламировать стихи, рассказывать сказки, ездить, летать. Для детей делают более простые модели, а для взрослых, которые тоже любят такие игрушки, роботы создаются более сложные и дорогие.
Многие организации используют роботов для обслуживания клиентов. Машины подключаются к базам данных, сервисам, системам безопасности, могут узнавать лица, выполнять несложные операции. Робот может заменить консультанта, гида, официанта и других сотрудников или взять на себя часть их функций.
Робототехника в нетехнических отраслях промышленности
Помимо машиностроения и
приборостроения, робототехника все чаще используется в угольной и
горнодобывающей промышленности, черной и цветной металлургии, строительстве,
легкой и пищевой промышленности и на транспорте
О важности развития
робототехники в этих отраслях уже свидетельствует тот факт, что большая часть рабочей
силы страны занята в этих отраслях, а уровень автоматизации ниже, чем в
машиностроении
Сегодня развитие
робототехники в немеханической отрасли в основном происходит за счет
использования опыта машиностроительной отрасли в использовании роботов в тех же
или похожих операциях — для обслуживания основного технологического
оборудования, погрузочно-разгрузочных операциях, таких основных операциях, как
нанесение покрытий, сварка, монтажные и монтажные работы и т.д.
Экстремальная робототехника.
Одной из целей робототехники
является выполнение различных видов работ в экстремальных условиях окружающей
среды, которые либо опасны и вредны для человека, либо полностью исключают их
присутствие. Соответствующая секция робототехники была названа
«экстремальной робототехникой».





Экстремальные условия
относятся как к чрезвычайным ситуациям, включая стихийные бедствия, так и к
обычным экстремальным ситуациям, определяемым технологией производства.
С интенсификацией
производства доля обоих постоянно растет. Особенно это касается атомной
энергетики и промышленности, химии, металлургии, горнодобывающей
промышленности, подводных работ, космических исследований и военного дела.
Экстремальные условия
определяются, прежде всего, внешними условиями эксплуатации (излучение, сильные
электромагнитные поля, экстремальные значения температуры, давления и т.д.).
Помимо внешних условий,
экстремальные ситуации также характеризуются определенным перечнем конкретных
работ, которые необходимо выполнить. Эти работы включают в себя сотни различных
технологических операций. Наиболее важным типом технических систем, необходимых
для выполнения перечисленных операций, являются роботизированные системы (RTS),
которые отличаются многофункциональностью и гибкостью и позволяют быстро
выполнять различные технологические операции. Кроме того, выполнение отдельных
типовых технологических операций требует достаточно широкого спектра
специальных технологических систем, с которыми РТС должна взаимодействовать.
Примерами таких специальных
технических систем являются строительные, дорожно-строительные, транспортные,
погрузочно-разгрузочные машины — экскаваторы, бульдозеры, краны и т.д., но в
специальном исполнении, предназначенном для использования в экстремальных
условиях окружающей среды.
Решение проблемы создания РТС для экстремальных условий связано со следующими особенностями:
- сложность (крайность) внешних условий, часто в пределах современных технологий
- сложность, разнообразие, уникальность (изменчивость) функций, подлежащих выполнению, что приводит к большой номенклатуре требуемых технических средств, как правило, с единообразным характером требований в данной методике
- проблема, как с точки зрения потребителей, так и производителей необходимых технических средств.
Учитывая эти особенности,
следующие принципы должны лежать в основе разработки экстремальных роботов.
Первый принцип —
функциональная и конструктивная унификация технических средств на основе их
модульной структуры.
Второй принцип заключается в
согласованности требований, предъявляемых к рассматриваемым техническим
средствам, и технических условий, с которыми эти средства должны
взаимодействовать в условиях максимальной общей технической и экономической
эффективности.
Важные дополнительные требования, которые должны предъявляться к экологическим устройствам для облегчения эксплуатации технического оборудования, предназначенного для работы в экстремальных условиях, направлены на обеспечение того, чтобы такие устройства выполняли следующие действия:
- движение, даже при наличии разрушений и препятствий;
- Выполнение различных манипуляционных операций с органами управления и контроля технологического оборудования;
- демонтажные и ремонтные работы с этим оборудованием;
- очищение и очистка от разрушений, очистка от загрязняющих веществ.
История роботов
Первым современным роботом стал Unimate, робот с механической рукой, разработанный для General Motors в 1961, выполнявший последовательность действий, записанную на магнитный барабан.
 Unimate – первый промышленный робот на заводе General Motors
Unimate – первый промышленный робот на заводе General Motors
Активное производство роботов началось в 1970-е годы. Прежде всего, они стали использоваться в производстве, для выполнения однообразных (и часто опасных) операций. Больше всего промышленных роботов используется в автомобильной промышленности, где они работают на штамповочных и сварочных участках, в покрасочных камерах, на сборке. Разумеется, роботы не могли сразу заменить людей в промышленности, но доля человеческого труда в производстве с тех пор неуклонно сокращается. Полностью автоматизированные фабрики, такие как фабрика IBM для сборки клавиатур в Техасе, называются «фабрики без освещения». Люди там уже не нужны: абсолютно всё производство, от момента выгрузки материалов и до получения готовой продукции у погрузочных ворот, полностью роботизировано и может работать круглосуточно и без выходных.
Роботы давно стали важной частью научной фантастики. В 1921 году роботы стали героями пьесы Карела Чапека «Р.У.Р
» (Россумовские Универсальные Роботы). А через 20 лет Айзек Азимов сформулировал три закона робототехники, которые надолго определили наши представления о роботах: